


Das Prinzip der MpC vs. Digitaldecoder
Gleich vorweg: Ich kann und will hier nicht die überflüssige Diskussion Analog oder Digital erneut beleben. Das wäre auch völlig müßig, weil meiner Meinung nach die Zeit der rein analog betriebenen Modellbahn hinter uns liegt. An den Möglichkeiten moderner und leistungsfähiger Elektronik kommt auch ein Modellbahner letzten Endes nicht mehr vorbei. Selbst überzeugte Analogfahrer haben häufig digitale Komponenten wie SB-Steuerungen, Anfahr- und Bremsbausteine oder digitale Fahrgeräte für analoge Loks, wie z. B. die Heißwolf-Regler, im Einsatz.
Hier geht es also mehr um die systembedingten Unterschiede der MpC-Block-Decoder (also den Platinen für die MpC-Fahrstromerzeugung für analoge Loks) zu den üblichen Lok-Decodern der Digitalsysteme.
 |
 |
| Abb. 1 MpC-Block-Platine (2 Blöcke + 2 Belegtmelder) | Abb. 2 Lok-Decoder (Rautenhaus SLX 870) |
Die MpC ist auch eine Digitalsteuerung, allerdings setzt sie, wie auch ihr Namen sagt, im Unterschied zu allen wesentlichen, marktrelevanten Digitalsteuerungen einen Computer voraus; ohne den geht nichts. Die üblichen Digitalzentralen, wie sie angeboten werden z. B. von Rautenhaus, Lenz, Zimo oder Uhlenbrock, um nur einige zu nennen, sind Handsteuerungen. Ein Computer ist zum Betrieb nicht notwendig. Allerdings kann man sie zu Computersteuerungen erweitern, indem sie über entsprechende Interfaces (Verbindungs-Bauteile) mit einem Computer und einem darauf laufenden Steuerungs-Programm (z.B. Railware, TrainController, WinDigiPet oder auch MpCdigital) verbunden werden. In diesem Fall übernehmen diese Programme eine Vielzahl von Steuerungsfunktionen, wie z. B. das elementare Einstellen einer Fahrstufe für eine bestimmte Lok an einer bestimmten Stelle der Gleisanlage, wobei das Programm nun sozusagen den Drehregler betätigt.
Der wesentliche technische Unterschied der MpC-classic (also der Analogversion der MpC) zu Digitalsystemen liegt darin, auf welche Weise die Loks ihre Steuerungs-Befehle erhalten.
Ansteuerung von Loks in Digitalsystemen ohne Computer
Bei den Digitalsystemen hat der Lokmotor - im Gegensatz zum bekannten Analogbetrieb - keine direkte Verbindung zu den stromführenden Schienen. Vielmehr gibt es jetzt in jeder Lok einen Befehlsempfänger mitsamt einer nicht unerheblichen Funktions-Logik, den sogenannten Decoder, also den winzigen Baustein, der u. a. über einen Microprozessor und damit über eine eigene "Intelligenz" verfügt. Dieser Baustein erhält von der Digitalzentrale per "Programmierung" (richtiger: Parametrisierung) die spezifischen Lokeinstellungen, die er speichert, und er erhält während des Betriebes vom Modellbahner per Regler seine Fahrbefehle (Fahrstufe, Fahrtrichtung), mit denen er nun eigenständig - unter Berücksichtigung der Lokeinstellungen - den Lokmotor steuert.
Nach wie vor wird der Fahrstrom über die Schienen an die Lok (genauer: den Lok-Decoder) geleitet. Gleichzeitig werden Fahrbefehle mittels einer speziellen Technik von der Digitalzentrale ebenfalls über die Schienen übermittelt. Die Übermittlung dieser Informationen (Lokadresse, Fahrstufe, Fahrtrichtung etc.) geschieht in einer nach Art und Zeit genau festgelegten Abfolge von elektrischen Signalen. Diese Festlegung nennt man "Protokoll", deren es für die NBahn im Wesentlichen zwei gibt - das SX-Protokoll und das DCC-Protokoll.
Auf den Schienen liegt ständig die max. Fahrspannung an. Jede Lok hat jedoch eine eigene Adresse, über die sie angesprochen wird. Nur Loks, die mittels ihrer Adresse mit einem Fahrbefehl angesprochen wurden, fahren auch. Alle anderen Loks lässt die Fahrspannung in den Schienen kalt. Dadurch ist es prinzipiell möglich, mehrere Loks mit individueller Einstellung in einem Stromkreis zu fahren oder abzustellen, ohne getrennte Gleisabschnitte einrichten und beschalten zu müssen.
(Zusätzlich kann über den Decoder die Beleuchtung ein- oder ausgeschaltet werden, auch bei stehenden Zügen. Weitere Funktionen sind darüberhinaus - je nach Decoder - möglich: beispielsweise Geräuschgeneratoren, Pantographen oder Kupplungen ansteuern, sofern die Hersteller von Rollmaterial auf die Idee kommen, ihre Produkte sinnvollen Möglichkeiten der Digitaltechnik zu öffen).
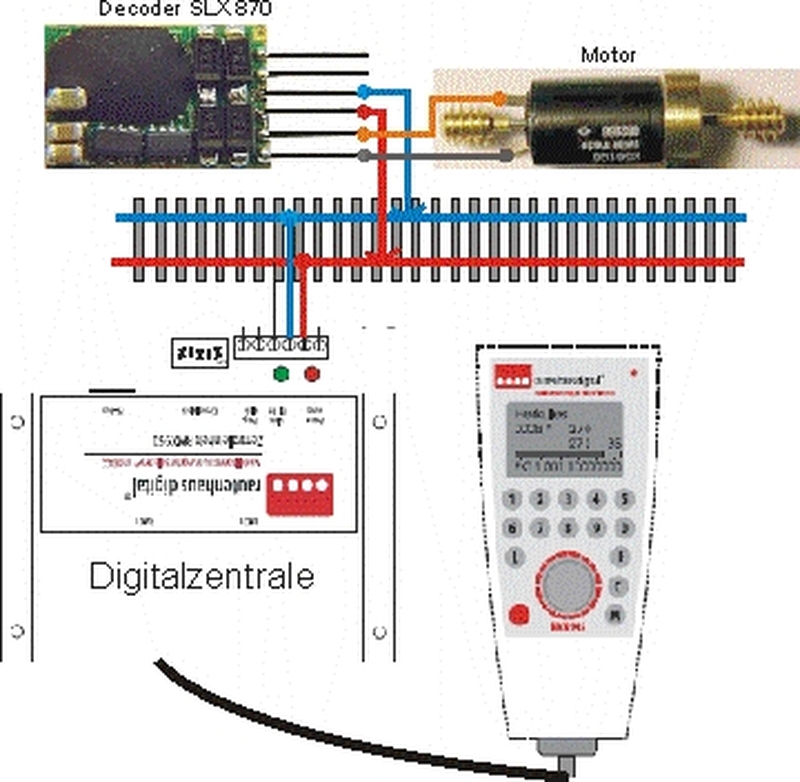 Für größere Darstellung auf das Bild klicken! |
Prinzipdarstellung der Ansteuerung von Loks im Digitalbetrieb. |
Bei dieser "archaischen" Betriebsform muss allerdings beachtet werden, dass möglich ist, was beim Vorbild nur in geregelten Ausnahmesituationen erlaubt ist: Es können mehrere Loks in einem Block fahren (auch in entgegengesetzte Richtungen) oder stehen! Also muss der Modellbahner selbst dafür sorgen, dass dies auch auf seiner Anlage nur geregelt geschieht (z. B. Vorspann- oder Nachschubbetrieb).
Neben den Vorteilen einer fantastisch feinfühligen Regelung seiner Loks muss der Modellbahner prinzipiell keinen größeren Schaltungs- und Verdrahtungsaufwand betreiben, um Züge (Loks) im Bahnhof oder auf dem Abstellgleis stehen lassen zu können, während gleichzeitig mit einem oder mehreren Zügen weitergefahren wird. Es sei aber sogleich gesagt: Nur wer seine Bahn vollständig von Hand steuern möchte, also jede Weiche, jedes Signal selbst stellen will und dazu jede Lok selbst per Regler anfahren und bremsen lassen möchte, der kann das so machen. Bei Mehrzugbetrieb hört der Spaß aber rasch auf; denn es tritt schnell eine Überforderung des Modellbahners ein, wenn er für mehrere Züge gleichzeitig die Weichen und Signale stellen und wie beim Vorbild einen gesicherten Betrieb garantieren soll. Spätestens dann wird er nicht um Gleistrennungen zur Erzeugung von Belegtmeldeabschnitten und den Einsatz von weiteren Bausteinen (Belegtmelder, Blocksteuerungen etc.) oder einen Computereinsatz herumkommen.
Exkurs:
Eine Sonderstellung nehmen Digitalzentralen wie z.B. die Ecos von ESU oder der Commander von Viessmann ein. Das sind Kombi-Geräte, bestehend aus Digitalzentrale, fest eingebauten Regeleinheit(en) und Computer, nur, dass der Computer und vor allem der integrierte Monitor kastriert sind. Der "Computer" beherrscht einige, meist mengenmäßig limitierte Funktionen, wie beispielsweise Fahrstraßenspeicherung und -schaltung, Lok-Verzeichnisse, Pendelzugsteuerung oder die - in meinen Augen lächerliche - Darstellung eines Gleisbildstellpultes (ein ordentliches Gleisbild, selbst einer kleineren Anlage, hat kaum Platz auf einem 19"-Monitor, geschweige denn auf einem Winzling von Anzeigeeinheit). Diese Geräte verfügen i.d.R. über ein eingebautes Computerinterface. Wer das dann nutzt, benötigt eigentlich eine Menge Leistungsmerkmale dieser Zentralen nicht mehr, hat sie aber zuvor bezahlt. Ich kann daher nur jedem raten, der sich in diese Richtung bewegen möchte, eine deutlich preiswertere Digitalzentrale ohne diesen Schnickschnack anzuschaffen und gleich einen "richtigen" Computer einzusetzen. Der Leistungsumfang und die Möglichkeiten der Steuerungsprogramme sind um Welten besser.
 |
Als Ausnahme kann hier allerdings die MS (Mobile Station) von Trix angesehen werden. Das Gerät ist im Internet um die 50 EUR zu bekommen und kann als sehr preiswerter Einstieg in die Digitaltechnik angesehen werden, zumal es sowohl das SX- als auch das DCC-Protokoll beherrscht. Selbst bei einem späteren Wechsel auf eine größere Zentrale oder eine Computersteuerung kann es immer noch als Handregler dienen. |
Ansteuerung von Loks in Digitalsystemen mit Computer
Bei Computereinsatz wird das Digitalsystem mittels eines Interface mit dem Computerprogramm verbunden. Das Programm hat z. B. die Bremskurve einer Lok gespeichert und übermittelt nun bei einer Bremsung die der Bremskurve entsprechenden, einzelnen Fahrstufenwerte an die Digitalzentrale, die sie ihrerseits über die Schienen auf der Basis des SX- oder DCC-Protokolls an den Lokdecoder weitergibt. Somit ist das Einstellen einer Anfahr- bzw. Bremsbeschleunigung im Decoder selbst nicht mehr unbedingt erforderlich. Das Programm kann insoweit u. a. die Funktion des Reglers (z.B. des Handreglers bei diversen Zentralen) übernehmen.
Ansteuerung von Loks mit der MpC
Bei der MpC_classic werden keine Bausteine in die Lok eingebaut. Sie fährt also wie bisher auf konventionelle Weise, indem der Lokmotor unmittelbar auf Fahrstrom in den Gleisen reagiert. Der Fahrstrom wird allerdings vom Computer zugeteilt. Somit ist Mehrzugbetrieb - wie bisher - nur möglich, wenn die Gleisanlage in eine sinnvolle Anzahl von Abschnitten (Blöcken) aufgeteilt wird. Der Computer übernimmt hierbei die Zuordnung des Fahrstroms zu den jeweiligen Loks in den jeweiligen Gleisabschnitten. Der zugeteilte Fahrstrom "wandert" also - computergesteuert - mit einer Lok mit. Alle Blockabschnitte, die gerade nicht befahren werden oder für einen nahenden Zug bereits reserviert sind, haben keinen Fahrstrom. Hierin liegt bereits der erste, gravierende Unterschied zu Digitalsystemen.
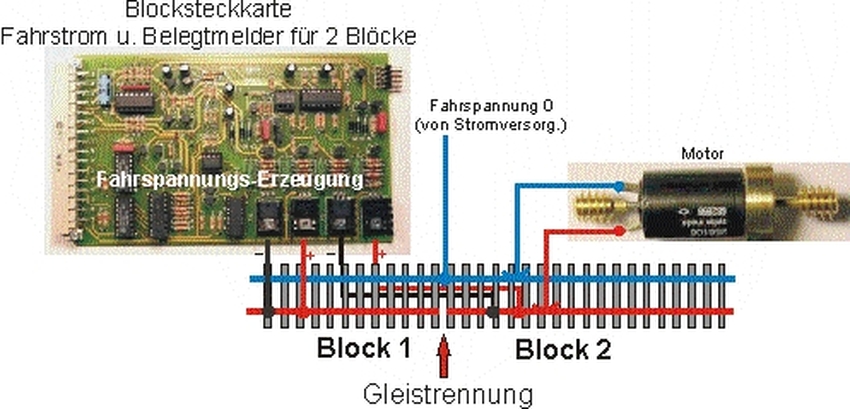
Für größere Darstellung auf das Bild klicken! |
Prinzipdarstellung der Ansteuerung von Loks mit der MpC. |
Auch mit der MpC können die Loks individuell feinfühlig gesteuert werden. Das setzt wie bei Digitalsystemen voraus, dass jede Lok mit ihren spezifischen Eigenarten eingestellt wird. Der Unterschied: Während die Einstellungen einer Lok bei Digitalsystemen (ohne Computeranschluss) im Decoder, also in der Lok, gespeichert werden, geschieht dies bei der MpC zentral im Computer für alle Loks. POM (programming on main), also das Einstellen von Lokparametern im laufenden Betrieb, ist bei der MpC systembedingt Standard, während noch eine Reihe von Digitalzentralen ein spezielles Programmiergleis für diesen Zweck erfordern (i.d.R. können die Decoderparameter über POM nur geschrieben, aber nicht gelesen werden). Der "Decoder" für einen Belegtmeldeabschnitt befindet sich hingegen bei der MpC auf einer zentralen Steckkarte, auf der gemäß Anweisung vom Computerprogramm der Fahrstrom (PWM) erzeugt und von dort auf die Schienen geleitet wird. Das Programm "weiß", wo sich gerade welche Lok auf der Anlage befindet und wie sie fahrstrommäßig angesteuert werden muss, damit sie so fährt, wie das zuvor für sie eingestellt wurde.
Wie man erkennen kann, gibt es also funktionell zwischen computergesteuerten Digitalsystemen und der MpC eigentlich keinen nennenswerten Unterschied - mit Ausnahme der Lastregelung, auf die ich noch näher eingehen werde.
Der Vorteil der MpC - rein technisch betrachtet - liegt somit vor allem darin, dass keine Loks umgerüstet werden müssen, um in den Genuss der Digitaltechnik zu gelangen. Ich will hier nicht die finanziellen Aspekte gegeneinander aufwiegen; denn die MpC kostet auch einiges an Geld. Es geht hier vielmehr um den zeitlichen und technischen Aufwand, einen vorhandenen Fuhrpark auf Decoder umzurüsten, der naturgemäß umso größer sein wird, je mehr Loks vorhanden sind, die umgerüstet werden müssen. Außerdem fehlt in älteren Loks und - unverständlicherweise - selbst in aktuell gefertigten häufig eine Steckerschnittstelle oder zumindest Lötpads und der Platz (!) für einen Decoder, so dass einige Umbaumaßnahmen notwendig werden, die dann mit Löten und ggf. mit Fräsarbeiten verbunden sind - nicht jedermanns Sache. Selbstredend kann man einen Umbau auch von Fachfirmen durchführen lassen, aber das verursacht natürlich nicht unerhebliche Zusatzkosten.
Für Gegner eines Computereinsatzes liegt ein Nachteil der MpC natürlich auf der Hand: Der "Genuss" ist nur mittels Computer erreichbar. Wer das nicht will, liegt mit der MpC falsch.
Die Lastregelung - zuverlässige Kontrolle der Geschwindigkeit
- Unterschiede zwischen Digitalsystemen und der MpC -
Der Vorteil der Digitalsysteme - vor allem mit Computersteuerung - liegt nach meiner Erfahrung insbesondere in der Fähigkeit der modernen Decoder, über den stets vorhandenen Soll-Ist-Vergleich (eingestellte Fahrgeschwindigkeit zu aktuell gefahrener Geschwindigkeit) eine Lastregelung zu gewährleisten. Das heißt, dass der Lokmotor vom Decoder selbständig so geregelt wird, dass die eingestellte Geschwindigkeit unter (fast) allen Umständen eingehalten wird, ohne dass der Modellbahner von Hand nachregeln muss. Das ist wichtig, wenn die Lok mal ohne, mal mit - unterschiedlicher - Anhängelast fährt, oder bei Berg- und Talfahrt.
Das kann die MpC systembedingt nicht leisten, weil sie vom Lokmotor keine Rückmeldung hat (haben kann), wie schnell er gerade dreht. Sie weiß nur, welche Fahrstufe eingestellt ist (wie schnell die Lok fahren SOLL), sie weiß aber nicht, wie stark der Lokmotor beispielsweise durch Bergfahrt oder Anhängelast beansprucht wird (wie hoch die IST-Geschwindigkeit ist). Ohne Nachregelung wird die Lok somit bei wechselnden Lasten unterschiedlich schnell fahren. Man hilft sich hier, indem man z. B. bei Bergstrecken temporär für diesen Streckenabschnitt eine prozentuale oder absolute Erhöhung der eingestellten Geschwindigkeit im "zentralen Decoder" einstellt. Für Loks mit oder ohne Bespannung stellt man unterschiedliche Fahrregler ein, die man dann der Lok in der jeweiligen Situation (ggf. per Programm) zuordnet.
Nun wird man einwenden: Züge müssen garnicht ständig mit gleichmäßiger Geschwindigkeit fahren. Auch beim Vorbild werden sie auf Steigungen ggf. langsamer. Das ist richtig, und der Vorteil der Lastregelung liegt primär auch nicht in diesem Punkt, wenngleich es praktisch ist, bei Berg- und Talfahrten in einer Wendel nicht nachregeln zu müssen. Sofern man sein Digitalsystem in Verbindung mit einem Computer betreibt, werden die Vorteile der Lastregelung vor allem darin sichtbar, dass eine recht verlässliche Berechnung von Bremswegen möglich wird. Einige Programme machen sich die Lastregelung der Decoder zunutze. Sie ermitteln pro Lok deren Fahrverhalten über alle Fahrstufen hinweg auf einem in seiner Länge exakt bekannten Gleisabschnitt (man sagt: Die Lok wird eingemessen). Die so ermittelten Daten (ein lokspezifisches Profil) werden pro Lok gespeichert. Auf der Basis dieser Daten stellen die Programme eine Zeit-Weg-Berechnung an (wieviel Zeit benötigt die Lok in jeder Fahrstufe, um eine Strecke x zurück zu legen?). Ergebnis: Man benötigt i.d.R. nur noch einen Abschnitt pro Block (eben den Block selbst). Das vermindert den Verkabelungsaufwand deutlich und spart auch Belegtmelder ein. Das Programm weiß, wie schnell (in Modell-km/h) ein von ihm kontrollierter Zug gerade fährt. Muss er angehalten werden, so errechnet es, in welchen Stufen es die Lok herunterregeln muss, damit diese am vorgesehenen Punkt sanft zum Stillstand kommen kann. Der Punkt ist jetzt aber kein separater Abschnitt mehr, sondern das Ende eines Belegtmeldeabschnittes (Blockes) oder auch ein virtuell im Belegtmeldeabschnitt definierter Punkt (z. B. Bahnsteigmitte). Dem Programm werden die Längen der Abschnitte bekannt gegeben, so dass es seine Berechnungen exakt anstellen kann. Dass das funktioniert, hängt eben damit zusammen, dass der Lok-Decoder das zuvor einmal eingemessene Geschwindigkeitsprofil einer Lok dank Lastregelung weitgehend verlässlich reproduziert. Meine zwischenzeitliche Erfahrung mit TraincontrollerTM zeigt, dass sich tatsächlich eine Genauigkeit von +/- ein bis zwei Zentimetern beliebig oft erreichen lässt, egal ob die Lok solo oder aber mit verschiedenen Anhängelasten unterwegs ist.
In diesem Punkt spielt speziell das Selectrix-System, genauer: der SX-Bus, seine Stärke aus: Da die Datenrate auf dem Bus (also die Menge an Informationen, die in einer definierten Zeiteinheit zwischen Zentrale und Decodern ausgetauscht werden kann) - auch unter stärkster Last - stets absolut gleich bleibt, ist eine höchst zuverlässige Berechnung der Geschwindigkeit durch die Programme möglich, da sich gegenüber den Bedingungen beim Einmessen keinerlei Veränderungen ergeben können.
Wie bereits weiter oben erwähnt, gibt es auch bei der MpC so etwas wie "Einmessen"; man testet das Verhalten der einzelnen Loks und stellt im Wege des Versuchs für jede Lok individuell ihre Anfahr- und Bremscharakteristik ein. Wie schon gesagt, fehlt nur die Überwachung und ggf. die automatische Nachregelung.
Bei der MpC wird eine Lok bei Erreichen eines Blockes, in dem angehalten werden muss, sofort auf die sogenannte "Schleichgeschwindigkeit" abgebremst. Am Ende des Blockes befindet sich typischerweise ein Belegtmeldeabschnitt, der sogen. Haltepunkt, in dem die schleichende Lok dann sanft zum Stehen kommt.
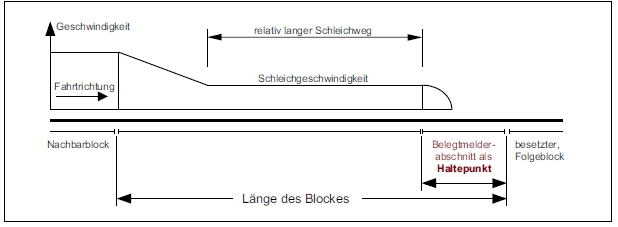
Ein MpC-Block mit einem Haltepunkt am Ende des Blockes.
©Grafik: Gahler+Ringstmeier
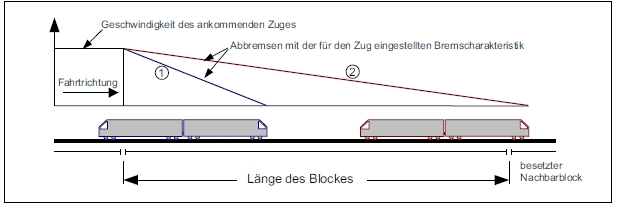
Bei langen Blöcken ist dieses Verhalten u.U. unbefriedigend, weil die Schleichfahrt zu lang andauert. Dieses Verhalten kann man aber durch den Einbau eines weiteren Belegmeldeabschnittes, dem sogen. Bremspunkt, weiter zum Blockende hin verlagern. Die Lok wird dann erst bei Erreichen dieses Bremspunktes abgebremst.
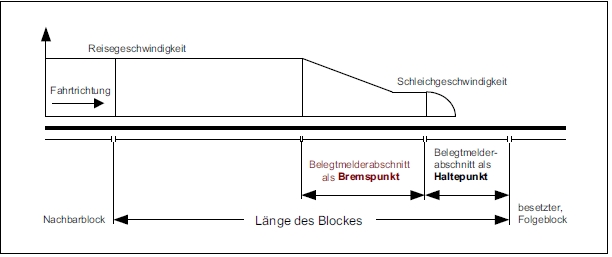
Ein MpC-Block mit einem zusätzlichen Belegtmeldeabschnitt als Bremspunkt.
©Grafik: Gahler+Ringstmeier
Sofern dem Block kein weiterer Abschnitt - ein Halteabschnitt und/oder ein Bremspunkt - zugeordnet ist, weiß die Steuerung natürlich nicht, an welcher Stelle im Block sich die Lok befindet. Daher würde sie sofort nach ihrem Eintreffen im Block auf Schleichgeschwindigkeit abgebremst und - je nach ihrem Laufverhalten und ihrer Einstellung - irgendwo im Block zum Stehen kommen. (Oder auch, was unerwünscht ist, in den normalerweise besetzten Folgeblock rutschen).
Ein MpC-Block ohne zusätzliche Belegtmeldeabschnitte.
©Grafik: Gahler+Ringstmeier
Darum wird sinnvollerweise immer an jedem Blockende wenigstens ein weiterer Belegtmeldeabschnitt, der Halteabschnitt, benötigt, damit eine Lok kontrolliert und langsam auslaufend am Blockende zum Stehen kommt. Natürlich könnte auch die MpC Zeit-Wege-Berechnungen anstellen, aber da die Lokmotoren nicht lastgeregelt sind, wäre das zu riskant. Die Züge würden vermutlich häufiger die vorgesehenen Haltepunkte überfahren. Allerdings gilt auch bei Digitalsystemen: Wer - vor allem im Schattenbahnhof - ganz sicher gehen will, baut zumindest einen kurzen Halteabschnitt zusätzlich ein. Wenn dieser Abschnitt dann eine Belegtmeldung auslöst, muss das Programm in jedem Fall die bereits langsam fahrende Lok auf Fahrstufe 0 setzen.
In Digitalsystemen lässt sich dieser Vorgang mit Hilfe einer Computersteuerung erheblich vereinfachen. Die MpC verfügt nicht über sogenannte virtuelle Belegtmelder, im Gegensatz zu einigen Steuerungsprogrammen für Digitalsysteme. So kann man z. B. in TraincontrollerTM die Bremsrampe und den Haltepunkt einfach per Software einstellen. Stellt sich heraus, dass die Bremsrampe zu flach oder zu steil ist oder der Haltepunkt zu kurz oder zu lang, dann trägt man einfach andere Zentimeter-Angaben in ein Fenster ein, und das war es. Siehe auch Virtuelle Belegtmelder. Wenn man hingegen bei der MpC einen Halteabschnitt zu kurz eingerichtet hat, kann man das nur hardwaremäßig korrigieren, sprich: Man muss die vorhandene Gleistrennung überbrücken und eine neue Gleistrennung vornehmen. Das kann im Einzelfall sehr kompliziert werden, wenn z. B. ein Schattenbahnhof für solche Aktionen nicht gut zugänglich ist.

